Quote:
Originally Posted by Shooting King

Nice initiative !!  |
Thx! Your words greatly inspired me!

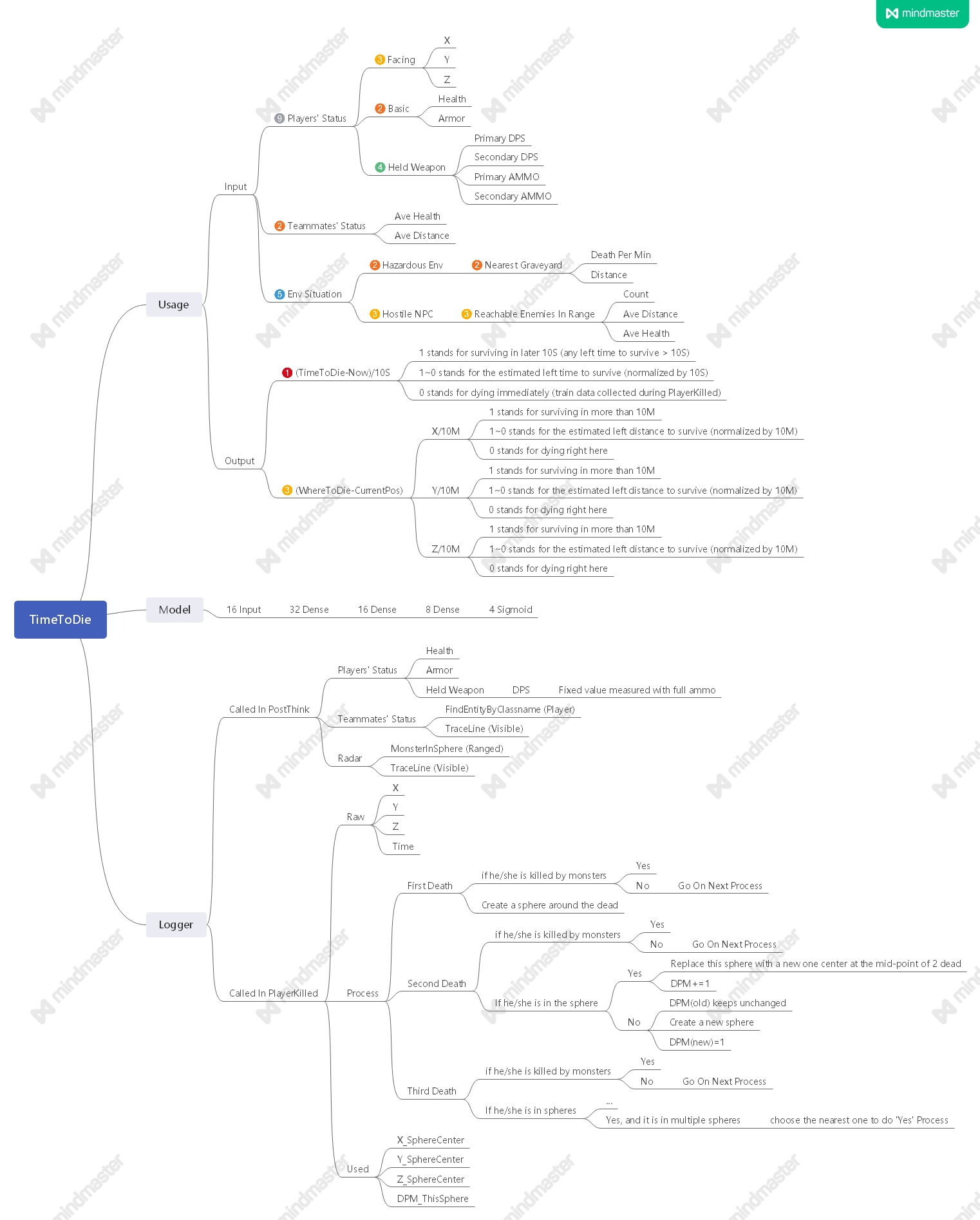
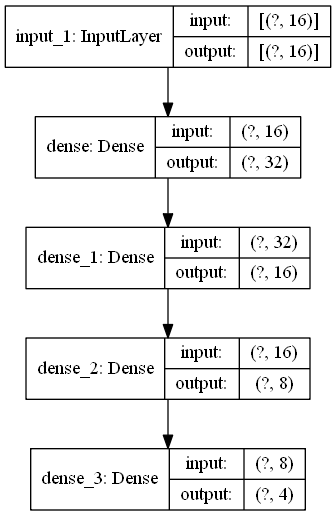
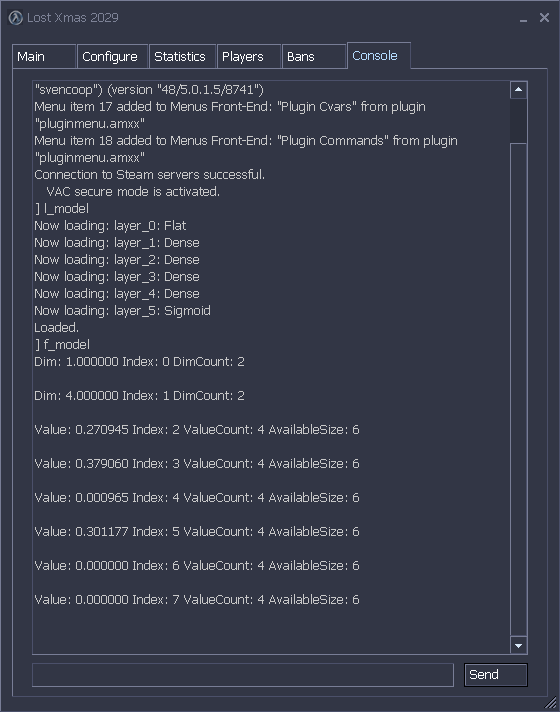
I have completed the test of prediction based on fake data (generated by the SMA script) and pretrained model (in the attached zip) and pushed all commits to the GitHub.
Now I decide to make a
ANN enhanced bot plugin as a demostration of this module, what hinder me is that
I don't know how to collect data of terrain and obstacles around a bot in a certain radius of range, which are used to
predict movement actions should be taken to transport bots to the destination in the range.
My current idea was inspire by laser radars used in SLAM robots, the laser emitter rotates and scan through the area, get coordinates of endpoints hit by the laser, and form a "Points Cloud" with these coordinates, the "Points Cloud" could be used to extract matrices and tensors for DL purpose, and I found the
trace_line function from
engine.inc, I think it may be abled to be applied like a laser radar...?
This figure shows the "Points Cloud" collected by a laser radar:

Has anyone have other thoughts or experience about this? If you can share me some info about this, I will be very very appreciate it!!!












 Linear Mode
Linear Mode

